
RoboCup 2003 Organizing Committee
June 4, 2003
Challenges
- Black and White Ball
- Localization
- Obstacle Avoidance
General
- Challenges will start with a whistle from the referee. The robots will be started via button press
- Before the whistle, the robot may not move its legs or locomote in any fashion. Movement of the head and tail is permitted.
- Off-board computation and sensing are not allowed. Only the resources provided on the robot performing the challenge may be used.
- Wireless communication is not allowed during the challenges. Since all of the challenges only use a single robot and off-board computation/sensing is not allowed, there is no one for the robot to talk to.
- The robot must be controlled autonomously. No human intervention is allowed.
- Holding is permitted in the challenges.
- If the ball is hit out of the field, it will be replaced at the spot in the field nearest where it went out. This is the same as during a game.
- Memory sticks for each challenge will be due 30 minutes before the first team is due to start each challenge. Memory sticks will continue to be accepted up to 15 minutes before the challenge with the application of a penalty. The penalty to be applied is detailed in each challenge. These time limits will be strictly enforced.
- For each challenge the teams will be ranked. The first place team receives 24 points, second 23 points, etc. Teams that are tied after all tie breakers are applied receive the average score the tied group would have received if the tie was broken. Teams that were disqualified receive 0 points for that challenge. The team with the highest total wins.
Challenge 1: Playing with a Black and White Ball
Time Limit
3 minutes
Purpose
To evaluate ability to score using a black and white ball. In the future, the ball will be changed to look like a regular soccer ball. The purpose of this challenge is to evaluate the abilities of teams to find and score using a black and white soccer ball.
Summary
The robot must score into the yellow goal using a black and white soccer ball.
Rules
Initial Position: The initial position and orientation of the challenge robot will be randomly determined. The initial position of the ball will be randomly determined. All teams will use the same initial positions.
Goal: To score on the yellow goal using a black and white soccer ball on an otherwise empty field.
Procedures:
- Score into the yellow goal. The ball is in the goal when all of the ball crosses the back edge of the goal line, the same as during a game.
- Late Penalty: A team will be have 5 seconds added to their time for each minute that their stick is late. A team will have an additional 30 seconds added to their time for sticks that are 10 or more minutes late.
Scoring:
Teams will be ranked based upon the following decision tree:
- Goal succeeded:
- Time to score the goal
- Goal not succeeded:
- Contact with ball succeeded:
- Time when contacted first
- Never in contact with ball:
- Distance between ball and robot
- Contact with ball succeeded:
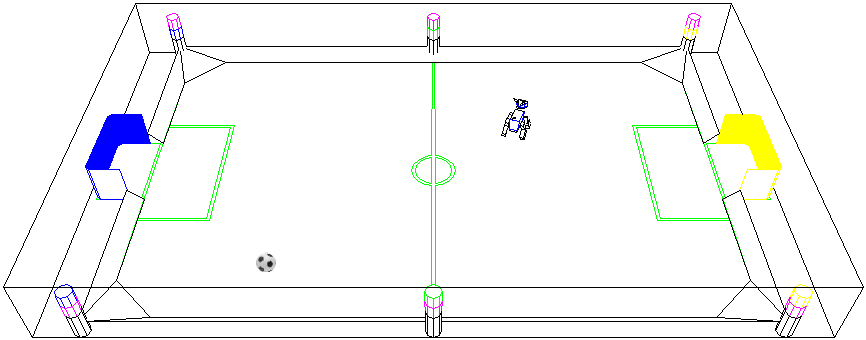
Figure 1. The challenger and a possible position of the black and white ball.
Challenge 2: Localization without the Colored Landmarks
Time Limit
3 minutes
Purpose
To evaluate localization ability in the absence of explicit markers. In the future, the colored markers will be removed. The purpose of this challenge is to evaluate the abilities of teams to localize in this kind of environment.
Summary
The robot must navigate to 5 points on the field that will be selected at random. At each point, the robot must stop and wag its tail.
Rules
Initial Position: The initial position and orientation of the challenge robot will be randomly determined. The position of the 5 target points will be selected at random.
Goal: To visit each of 5 pre-selected random points on the field and stop and wag the tail at each point. The points may be visited in any order.
Procedures:
- The field will be the standard RoboCup? field with the colored markers removed. Note that the colored goals will not be removed. The 5 target points will be marked with circles of 5, 10 and 15cm diameter that cannot be detected by the robot.
- The team should indicate that they are at the target point by stopping and wagging the tail for 3 seconds.
- Each team may indicate at most 5 targets, that is, after 5 wags, the challenge is over and no further score will be awarded.
- The selected points are written to each team’s stick in a text file located at /MS/points.cfg. The format of the file has one target point per line, the x coordinate followed by the y coordinate. Here is an example file. The file describes the positions as shown in Figure 2 marked by three circles. The coordinates are given in cm, and the origin of the system of coordinates is the center of the field. The x-axis points from the blue goal (negative x) to the yellow goal (positive x). y-coordinates on the right of this axis are negative, on the left they are positive. Each team is responsible for writing code to read this file. Points are guaranteed to be at least 15cm from the nearest obstacle.
- Late Penalty: A team will be have 5 seconds added to their time for each minute that their stick is late. A team will have 1 point deducted from their score for sticks that are 10 or more minutes late.
Scoring:
When the robot shakes its tail, the referee will determine the smallest circle that is still under the central body of the robot (i.e. the “core”). The team scores 3 points for stopping over the 5cm circle, 2 points for the 10cm circle, and 1 point for the 15cm circle. In the case of a tie, the order of the teams will be decided based upon time. The time for a team is the time at which they last scored. So it is more important to reach the target positions precisely than to be fast.
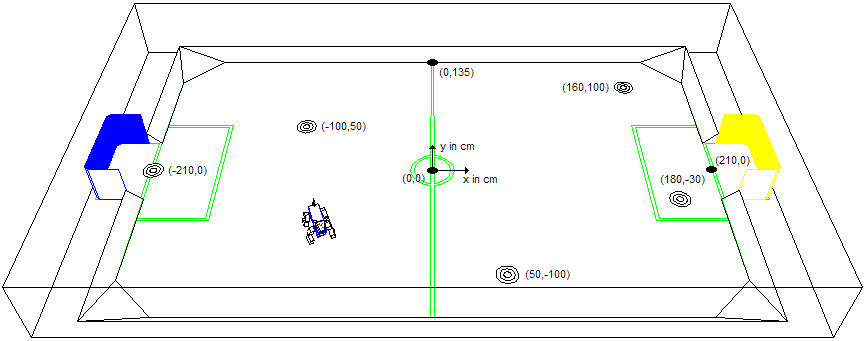
Figure 2. The challenger and the five target positions given in the example file.
Challenge 3: Obstacle Avoidance
Time Limit
3 minutes
Purpose
To evaluate obstacle avoidance ability. In the future, the robots will be expected to avoid unnecessary collisions with other robots.
Summary
The robot must navigate from one goal box to the other while avoiding robots that are standing still in unknown locations.
Rules
Initial position: The challenge robot will wear a blue uniform and start in the blue goal box facing the yellow goal. Seven obstacle robots (4 red and 3 blue) will be positioned at random locations on the field outside the goal boxes. They will use the typical UNSW standing position used by many teams in the league. It is only guaranteed that there is a path to the goal that is never narrower than 30 cm.
Goal: The task of the robot is to reach the yellow goal with as few contacts to other robots as possible. “Reaching” means to have at least two feet in the yellow goal area.
Procedures:
- The positions of the obstacle robots will be determined randomly.
- The borders of the zones (see Figure 3) are not visible to the robot.
- Late Penalty: A team will have 5 seconds added to their time for each minute that their stick is late. A team will have 1 point deducted from their score for sticks that are 10 or more minutes late.
Scoring:
The teams score by the following criteria:
- Six zones are defined on the field as shown in Figure 3. For each new zone the robot enters (at least with two feet), it scores one point.
- For each obstacle the robot touches, it looses one point. A contact to a robot can be arbitrarily short, but it is only counted if it happens at least five seconds after the previous contact, i.e. several collisions with the same robot in a short sequence will be counted as a single contact.
- In case of a tie, teams are ranked by the number of zones entered and by the time it took the robot to reach the zone closest to the yellow goal.
For example if the robot reached Zone E (5 points), and it had two collisions (-2 points), it will score 3 points. If a robot enters the yellow goal without any collisions, it will score 6 points.
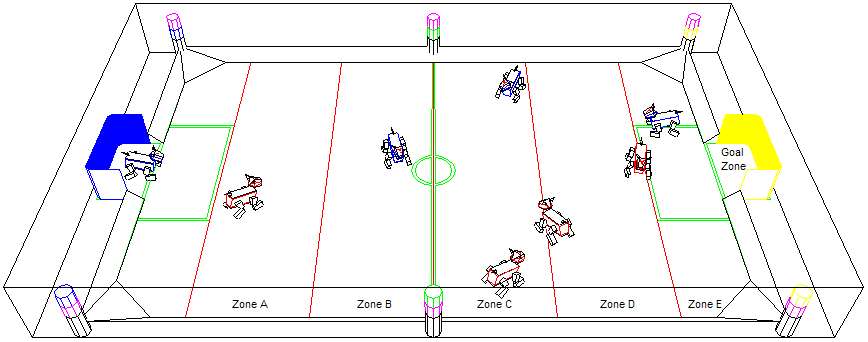
Figure 3. A typical obstacle avoidance scenario. The challenger is the robot on the left.